درک اینکه هوش مصنوعی چه قابلیتهایی دارد فراتر از تصورات ماست، اما یکی از شناختهشدهترین موضوعات مرتبط با پتانسیل هوش مصنوعی، رانندگی خودکار اتومبیل است. زمانی یکی از نمادهای فیلمهای علمی تخیلی برای نمایش آینده، ماشینهایی با هدایت خودکار بودند. اما به راستی چقدر با داشتن چنین ماشینهایی فاصله داریم؟؟
هوش مصنوعی یا به اختصار AI به یونان باستان برمیگردد، اگر چه این اصطلاح تا سال 1956 ابداع و به یک حوزه تبدیل نشد. در سالهای اخیر که این فناوری به سرعت پیشرفت کرده است. کاربردها به طور قابل توجهی گسترش یافته و شامل موضوعاتی مانند کشاورزی، پزشکی، ریاضیات، مهندسی، آموزش، دستیارهای صوتی و بسیاری بخشهای دیگر حتی رانندگی وارد شده است.
همگرایی هوش مصنوعی و خودروهای خودران گام بزرگی برای صنعت خودرو و صنعت هوش مصنوعی است. ما فقط میتوانیم تصور کنیم که هوش مصنوعی چه امکاناتی دارد، اما یکی از شناختهشدهترین موضوعات مرتبط با پتانسیل هوش مصنوعی، رانندگی خودکار است. در سالهای اخیر، پیشرفتهای عمدهای توسط شرکتهایی مانند تسلا، وایمو و علیبابا به سمت ایجاد وسایل نقلیه کاملاً خودران با هوش مصنوعی انجام شده است.
در این مقاله، نگاهی دقیقتر به استفاده از هوش مصنوعی در وسایل نقلیه خواهیم داشت – از نقش آن در زیرساختها، تا الگوریتمهایی که هوش مصنوعی را برای رفتن به جادهها تجهیز میکنند و همچنین چالشهای موجود در این زمینه مرور میکنیم.
خودروی خودران چیست؟

خودروهای خودران وسایل نقلیهای هستند که قادر به انجام همان اعمالی هستند که توسط انسانهای باتجربه بدون هیچ گونه ورودی فیزیکی از سوی انسان هدایت میشوند. آنها میتوانند موانع و علائم را تفسیر کنند تا به تنهایی حرکت کنند. آنها به دستورالعملها گوش میدهند و با کمک حسگرها،هوش مصنوعی سیستمهای یادگیری ماشین، محرکها و الگوریتمهای پیچیده، دستور را اجرا میکنند.
هوشمندی ماشینهای خودران به سطوح مختلفی تقسیم میشود
مدتی است که هوش مصنوعی در خودروهای مدرن وجود دارد. همه چیز با دستیارهای هوشمند راننده شروع شده است که محیط اطراف خودرو را کنترل میکنند و از راننده پشتیبانی میکنند یا در مواقع اضطراری یا خطر تصادف به آنها هشدار میدهند. چنین سیستمهایی به رانندگان اجازه میدهد تا از راهحلهایی مانند:
• ترمزاضطراری: به عنوان مثال، سیستم CWAB ولوو می تواند از قدرت کامل ترمز برای توقف خودرو و جلوگیری از تصادف استفاده کند.
• دید در شب: این سیستمها از دوربینهای ترموگرافی(گرمایی) برای افزایش فاصله دید در تاریکی یا شرایط آب و هوایی بد استفاده میکنند. مرسدس چنین راه حلی را ارائه میدهد.
• ارتباطات و هشدارهای پیشرفته: دستورات صوتی، هشدارهای آب و هوا و غیره.
• کنترل لاین: هنگامی که از خط خود خارج میشوید، وسیله نقلیه به شما هشدار میدهد.BMW چنین دستیاری را ارائه میدهد. اما این تازه شروع است. همه ما به این دستیاران هوشمند عادت کردهایم، زیرا آنها به ویژه در خودروهای درجه یک رایج شدهاند(البته منظور از ما، که واقعا ما که نیست تا زمانی که پراید فولآپشن رو داریم کی مرسدس و بی ام دبلیو را نگاه میکنه). بذارید جلوتر برویم چون امروز، ما همه چیزهایی را که برای قرار دادن هوش مصنوعی در خودروهای خودران نیاز داریم، در اختیارداریم و آنها را %100 خودران میکنیم. شرکت شما نیز میتواند از این فناوری بهره مند شود.
اینها مواردی هستند که تا حدودی در ماشینهای روز دنیا در حال بکارگیری هستند. به همین ترتیب به تعریفی میرسیم که هوشمندی ماشینهای خودران را به شش سطح تقسیم میکند:
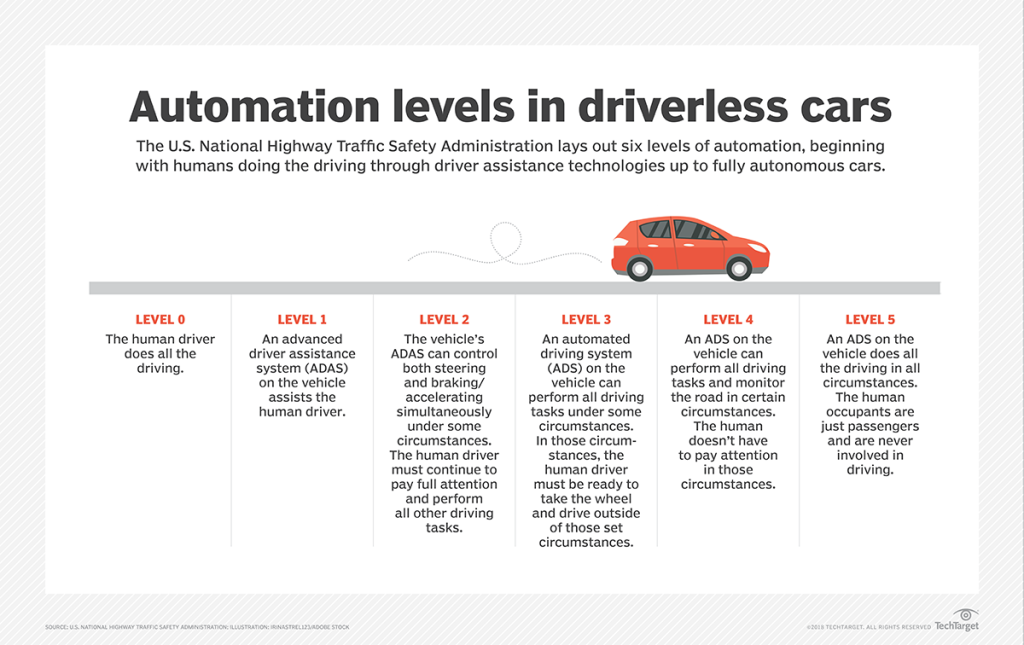
سطحبندی اتوماسیون ماشینهای خودران
اداره ملی ایمنی ترافیک بزرگراه ایالات متحده(NHTSA) شش سطح از اتوماسیون را ارائه میدهد که باسطح 0 شروع میشود که در آن صفر تا صد رانندگی با انسان میباشد(به زبان عامیانه همون پراید خودمون منظورشه). فنآوری کمک راننده تا اتومبیلهای کاملا ً خودران. در اینجا پنج سطحی هستند که از اتوماسیون سطح 0 پیروی می کنند:
- سطح 1: یک سیستم پیشرفته کمک راننده(ADAS) به راننده انسانی در فرمان، ترمز کردن یا شتابگیری کمک میکند، البته نه به طور همزمان. یک ADAS شامل دوربینهای دید عقب و ویژگیهایی مانند هشدار لرزان صندلی برای هشدار دادن به رانندگان در هنگام خروج از خط حرکت است.
- سطح 2: یک ADASکه میتواند به طور همزمان هدایت کند و ترمز کند یا شتاب بگیرد در حالی که راننده کاملا ً در پشت فرمان هوشیار است و به عنوان راننده به کار خود ادامه میدهد.
- سطح 3: یک سیستم رانندگی خودکار (ADS) میتواند تمام وظایف رانندگی را تحت شرایط خاصی انجام دهد، مانند پارک کردن ماشین. در این شرایط، راننده انسان باید آماده کنترل مجدد باشد و همچنان باید راننده اصلی وسیله نقلیه باشد.
- سطح 4: یک ADS می تواند تمام وظایف رانندگی را انجام دهد و در شرایط خاص محیط رانندگی را کنترل کند. در این شرایط، ADSبه اندازه کافی قابل اعتماد است که راننده انسانی نیازی به توجه ندارد.
- سطح 5: خودرو به عنوان یک راننده مجازی عمل میکند و تمام رانندگی را انجام میدهد ADS همه شرایط سرنشینان انسان مسافر هستند و هرگز انتظار نمیرود که وسیله نقلیه را برانند.
ازسال2022، خودروسازان به سطح 4 رسیدهاند. سازندگان باید انواع نقاط عطف تکنولوژیک را برطرف کنند و چندین موضوع مهم باید قبل از خرید وسایل نقلیه کاملا ًخودران و استفاده در جادههای عمومی در ایالات متحده بررسی شود. حتی اگر خودروهای سطح 4 برای مصرف عمومی در دسترس نیستند، اما به روشهای دیگری استفاده میشوند.
یک خودروی موفق سطح 5 باید بتواند به موقعیتهای رانندگی جدید به خوبی یا بهتر از یک انسان واکنش نشان دهد.
هوش مصنوعی و رانندگی خودکار
هوش مصنوعی بزرگترین عامل پیشرفت در ایجاد خودروهای خودران بوده است. اولین خودروهای خودران در دهه 1980 رونمایی شدند، با این حال، سطوح 4 و 5 خودروهای خودران(که کاملاً خودران هستند) توسط هوش مصنوعی ممکن شد.
برای دستیابی به رانندگی مستقل، هوش مصنوعی نیاز به برنامهریزی و اجرای اقدامات بدون تأثیر راننده انسانی دارد. پیشرفت شاخههایی مانند یادگیری عمیق و بینایی رایانه در هوش مصنوعی این امکان را فراهم کرده است. هوش مصنوعی برای انجام همان عملکردهای یک راننده انسانی مجهز شده است. از تواناییهای تشخیص و تصمیمگیری برخوردار است، عملکردهای حسی و توانایی مدل سازی دادهها با الگوریتمهای یادگیری عمیق است. مجهز به این نوآوریها، وسیله نقلیه مجهز به هوش مصنوعی میتواند به طور مستقل عمل کند.
نقش هوش مصنوعی در ساخت زیرساخت برای وسایل نقلیه خودران
برای اینکه یک خودرو کاملاً مستقل باشد، باید دوربینی مجهز به سیستم ارتباطی و سنسور داشته باشد. این ویژگیها خودرو را قادر میسازد تا دادههایی تولید کند که بتواند با آن کار کند. نقش هوش مصنوعی در ایجاد این زیرساخت برای وسایل نقلیه خودران این است که این ویژگیها، بتواند ویژگیهای یک راننده انسانی را نشان دهد. هوش مصنوعی آن را قادر میسازد با استفاده از دادههایی که با استفاده از اجزای نصب شده در خودرو جمعآوری شده است، ببیند، بشنود، فکر کند و تصمیم بگیرد.
خودروهای خودران چگونه باید در مورد زندگی یا مرگ تصمیم بگیرند؟
نگرانی زیادی در بین رانندگان در مورد ایمنی سوار شدن در خودروهای خودران وجود دارد. این سؤال که چگونه وسایل نقلیه خودران مسافران را در شرایط مرگ یا زندگی ایمن نگه میدارند، سؤال مهمی است که شایسته بررسی است. سناریوهای احتمالی بیپایانی وجود دارد که در آن یک هوش مصنوعی میتواند مجبور به اتخاذ چنین تصمیمی شود. به همین دلیل است که به جای برنامهریزی یک وسیله نقلیه خودران برای واکنش در شرایط زندگی یا مرگ، بهتر است آن را طوری طراحی کنید که بتواند از این شرایط به طور کلی جلوگیری کند.
به نظر میرسد این رویکردی است که بسیاری از شرکتها در حال توسعه خودروهای خودران خود با انجام اقداماتی مانند آموزش تشخیص موانع و توقف یا دور زدن آنها انجام میدهند. ابزارهایی با هوش مصنوعی برای جلوگیری از تصادفات در خودروهای معمولی ایجاد شدهاند. به این صورت که با حدس احتمالات مختلف و آنالیز پیوسته محیط پردازش کرده و تصمیمگیری میکند.
اهمیت GDDR6 در آینده رانندگی خودران
حافظه GDDR6 به دلیل پهنای باند و سرعت بالاتر نسبت به نسخههای قبلی خود شناخته شده است. پهنای باند آن چیزی است که موتور کامپیوتری سیستمهای هوش مصنوعی را که در قلب پیشرفت وسایل نقلیه خودران هستند، اجرا میکند. GDDR6 همچنین به دلیل توانایی خود در مقاومت در برابر شرایط سختی که معمولاً وسایل نقلیه در جادهها با آن مواجه میشوند شناخته شده است. فناوری حافظه GDDR6 قطعا نقش مهمی در پیشرفت خودروهای خودران خواهد داشت.
چگونه خودروهای خودران داده های خود را تولید می کنند
هوش مصنوعی مورد استفاده در وسایل نقلیه خودران باید بتواند محیط اطراف خود را “دیدن” کند و این با استفاده از دوربینها، رادار و LIDAR انجام میشود. با کمک این سنسورها و دوربینهایی که در قسمتهای مختلف خودرو نصب شدهاند، هوش مصنوعی اطلاعاتی را میگیرد که از آنها میتوان تصمیم گرفت. در زیر بخشهای جداگانه سیستم و نقشی که در جمعآوری دادهها برای خودروهای خودران ایفا میکنند، آمده است.
حسگرها
سنسورها حکم چشم آدمی را برای ماشین خودران دارند. به این صورت که سنسورها موقعیت ماشین شما و نزدیکی آنها به وسایل نقلیه دیگر، عابران پیاده و اشیاء موجود در جاده را کنترل میکنند. دو حسگر مورد استفاده توسط وسایل نقلیه خودران عبارتند از: تشخیص و محدوده تصویربرداری نور حسگر (LIDAR) و تشخیص و فاصله رادیویی (حسگر RADAR).
- حسگر LIDAR فواصل را اندازهگیری میکند و اجزای جاده مانند خطکشی جاده و محدودیتها را با تابش پالسهای نور لیزر از محیط اطراف خودرو شناسایی میکند.
- سنسور RADAR از همان اصول حسگر LIDAR استفاده میکند با این تفاوت که از امواج رادیویی استفاده میکند. این شامل یک فرستنده امواج الکترومغناطیسی، یک آنتن برای دریافت و ارسال، یک پردازنده که خصوصیات اجسام را تعیین میکند و یک گیرنده است. هنگامی که امواج رادیویی فرستنده از جسم منعکس می شود، سپس به گیرنده بازگردانده میشود و اطلاعات مربوط به شی توسط پردازنده استنباط میشود.
سنسورهای LIDAR و RADAR مزایا و معایب خود را دارند که استفاده آنها در کنار هم به صورت تکمیل نیاز این خودروها را پوشش میدهد.
دوربین ها
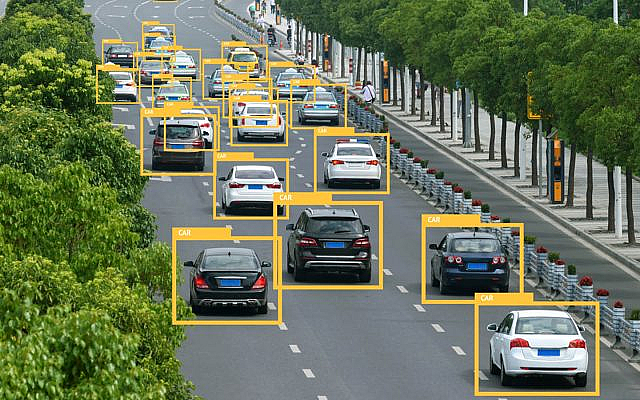
دوربینها همچنین به عنوان حسگر تصویر در وسایل نقلیه خودران شناخته میشوند. آنها اجسام را در دید خود تشخیص میدهند، آنها را شناسایی و طبقهبندی میکنند، سپس فاصله بین ماشین و شی را تعیین میکنند.
اهمیت حاشیه نویسی دادهها در پروژه های هوش مصنوعی خودرو
دوربینها و حسگرها ممکن است به خودرو اجازه «دیدن» محیط اطراف خود را بدهند، اما این توانایی بصری بدون حاشیهنویسی دادهها بیفایده خواهد بود. حاشیهنویسی دادهها بخش مهمی از پروژه های هوش مصنوعی خودرو است زیرا امکان شناسایی اشیاء را فراهم میکند. هنگامی که اطلاعات بصری تفسیر شد، میتوان از آن استفاده کرد. بدون حاشیهنویسی مناسب دادهها، هوش مصنوعی مورد استفاده در خودرو مستعد تصادف و برای استفاده ناایمن خواهد بود. هر چه کیفیت حاشیه نویسی بالاتر باشد، دقت هوش مصنوعی بالاتر و احتمال خرابی کمتر میشود.
نحوه استفاده از الگوریتمهای هوش مصنوعی خودرو برای خودروهای خودران
الگوریتمهای هوش مصنوعی خودرو برای ماشینهای خودران با استفاده از مجموعه دادههای واقعی برای آموزش آنها استفاده میشود. این آموزش چیزی است که به آنها کمک میکند تا بر اساس آنچه مشاهده کردهاند و آموختهاند، توانایی تصمیمگیری را توسعه دهند.
یادگیری تحت نظارت در مقابل یادگیری بدون نظارت
الگوریتمهای هوش مصنوعی خودرو میتوانند از طریق یادگیری تحت نظارت یا بدون نظارت یاد بگیرند.
- یادگیری تحت نظارت – تفسیر دادهها بر اساس آموزش نحوه رمزگشایی دادهها
- یادگیری بدون نظارت – هوش مصنوعی به خودی خود رها میشود تا دادههایی را که دریافت کرده است بدون هیچ دستورالعمل یا ورودی در مورد نحوه انجام این کار پردازش کند.
از آنجایی که طبقهبندی دادهها در خودروهای خودران مورد نیاز است، یادگیری تحت نظارت روش یادگیری ماشینی ترجیحی برای خودروهای خودران است.الگوریتمهای یادگیری ماشینی مورد استفاده در اتومبیلهای خودران
بسیاری از الگوریتمهای یادگیری ماشینی را میتوان توسط خودروهای خودران استفاده کرد، که همه آنها را میتوان به یک یا چند دسته از دستههای زیر طبقهبندی کرد:
- الگوریتم های رگرسیون – در پیشبینی رویدادها با ارزیابی رابطه بین دو یا چند متغیر و مقایسه اثرات آنها در مقیاسهای مختلف خوب است.
- الگوریتمهای ماتریس تصمیم – عملکرد رابطه بین مجموعههای ارزش را تجزیه و تحلیل، شناسایی و رتبه بندی می کند.
- الگوریتمهای تشخیص الگو – این الگوریتمها به عنوان الگوریتمهای طبقهبندی نیز شناخته میشوند. آنها الگوهای بین مجموعه دادهها را تشخیص داده و آنها را طبقهبندی میکنند.
- الگوریتمهای خوشهای – در مواردی که تشخیص تصویر به دست آمده آسان نیست یا توسط الگوریتم تشخیص الگو طبقهبندی نشده است، ساختار را از نقاط داده کشف کنید.
در میان هزاران الگوریتم موجود در هر یک از این دستهها، پنج الگوریتم وجود دارد که بیشترین پتانسیل را برای خودروهای خودران نشان میدهد.
SIFT (Scale-Invariant Feature Transform) برای استخراج ویژگی
این الگوریتم یک الگوریتم تشخیص ویژگی است که برای شناسایی، توصیف و تطبیق نقاط کلیدی در یک تصویر شی که تا حدی قابل مشاهده است استفاده میشود. سپس از این نکات کلیدی برای شناسایی تصویر شیء مورد نظر استفاده میشود.
AdaBoost برای طبقهبندی دادهها
الگوریتم AdaBoost هم به عنوان الگوریتم رگرسیون و هم به عنوان الگوریتم طبقهبندی استفاده میشود، اما تمرکز در این زمینه بر روی AdaBoost به عنوان یک الگوریتم طبقهبندی خواهد بود. هنگامی که برای طبقهبندی دادهها استفاده میشود، دادهها را برای پشتیبانی از فرآیند یادگیری هوش مصنوعی خودرو جمعآوری و طبقهبندی میکند. AdaBoost تواناییهای تصمیمگیری هوش مصنوعی را با گروهبندی دادههای طبقهبندی کننده با عملکرد پایین برای دریافت دادههای با کارایی بالا بهبود میبخشد.
TextonBoost برای تشخیص اشیا
الگوریتم TextonBoost از نظر عملکرد شبیه به الگوریتم AdaBoost است زیرا طبقهبندیکنندههای با کارایی پایین را ترکیب میکند تا یک طبقهبندی کننده با عملکرد بالا به دست آید. تفاوت عمده بین TextonBoost و AdaBoost در این واقعیت است که اولی میتواند دادههای مربوط به ظاهر، زمینه و شکل را تفسیر کند. با ترکیب این سه طبقه بندی کننده، الگوریتم TextonBoost میتواند تصاویر و اشیاء را با دقت بیشتری تشخیص دهد.
هیستوگرام گرادیانهای جهت دار(HOG)
HOG یک توصیفگر ویژگی است درست مانند الگوریتم تغییر ویژگی تغییر ناپذیر مقیاس که برای شناسایی اشیا استفاده میشود. مکان تصویر شی را تجزیه و تحلیل میکند تا نحوه حرکت آن را تعیین کند. سپس آنها را به سلولها تقسیم میکند و هر یک از سلولها را در هیستوگرام گرادیانهای جهتیافته محاسبه میکند، نتیجه را عادی میکند و برای هر سلول یک توصیفگر برمیگرداند.
اگرچه HOG به دلیل اینکه به الگوریتم خاصی مرتبط نیست، کاملاً به عنوان یک الگوریتم یادگیری ماشین در نظر گرفته نمیشود، اما همچنان در یادگیری ماشین بسیار مفید است.
یولو (شما فقط یک بار نگاه میکنید)
YOLO یک الگوریتم یادگیری ماشینی مبتنی بر الگوریتم رگرسیون است که برای شناسایی و گروهبندی اشیاء استفاده میشود. الگوریتم YOLO اشیاء را در خط دید هوش مصنوعی تشخیص میدهد و آنها را به گروهها اختصاص میدهد. سپس ویژگیهای خاصی را برای هر مجموعهای از اشیاء که گروهبندی کرده است تعیین میکند و تشخیص آنها را برای هوش مصنوعی آسانتر میکند.
سایر الگوریتمهای یادگیری ماشینی که می توان از آنها استفاده کرد
بسیاری از الگوریتمهای یادگیری ماشینی دیگر مانند K-means، تجزیه و تحلیل اجزای اصلی، ماشینهای بردار پشتیبانی و غیره در خودروهای خودران استفاده میشوند. صرف نظر از اینکه کدامیک مورد استفاده قرار میگیرند، الگوریتمهای یادگیری ماشینی، خودروهای خودران را زنده میکنند. بدون ادغام این الگوریتمها، خودروهای هوش مصنوعی هرگز امکان پذیر نبودند.
![]() مزایاو معایب خودروهای خودران
مزایاو معایب خودروهای خودران

مهمترین مزیتی که توسط طرفداران خودروهای خودران تبلیغ میشود، ایمنی است. پیشبینی آماری وزارت حمل ونقل ایالات متحده و NHTSA از تلفات ترافیکی برای سال 2017 تخمین زده است که در آن سال 3715 نفر در تصادفات وسایل نقلیه موتوری جان خود را از دست دادند. NHTSA تخمین زده است که 94درصد تصادفات جدی ناشی از خطای انسانی یا انتخابهای نادرست، مانند رانندگی در حالت مستی یا حواسپرتی است.
اگرچه ماشینهای خودران هنوز در برابر عوامل دیگری مانند مشکلات مکانیکی که باعث تصادف میشوند آسیب پذیر هستند. اگر خودروهای خودران بتوانند به میزان قابل توجهی تعداد تصادفات را کاهش دهند، مزایای اقتصادی آن بسیار زیاد خواهد بود. به گفته NHTSA، صدمات بر فعالیت اقتصادی تأثیر میگذارد، از جمله 57/6 میلیارد دلار در بهرهوری از دست رفته در محل کار و 594 میلیارد دلار به دلیل از دست دادن زندگی و کاهش کیفیت زندگی به دلیل آسیبها.
تأثیر ماشین خودران بر ترافیک شهری
درتئوری، اگر جادهها عمدتا ً توسط خودروهای خودران اشغال میشد، ترافیک به آرامی انجام میشد و تراکم ترافیک کمتری وجود داشت. در خودروهای تمام اتوماتیک، سرنشینان میتوانند در حین رفتوآمد به محل کار، فعالیتهای کاری خود را انجام دهند. افرادی که به دلیل محدودیتهای فیزیکی نمیتوانند رانندگی کنند، میتوانند استقلال جدیدی از طریق وسایل نقلیه خودران پیدا کنند و فرصت کار در زمینههایی را خواهند داشت که نیاز به رانندگی دارند.
کامیونهای خودران در ایالات متحده و اروپا آزمایش شدهاند تا به رانندگان اجازه دهند از رانندگی خودکار در مسافتهای طولانی استفاده کنند و راننده را برای استراحت یا تکمیل وظایف آزاد کند و ایمنی راننده و بهرهوری سوخت را بهبود بخشد.
نقاط ضعف فناوری خودران میتواند این باشد که سوار شدن بر وسیله نقلیه بدون راننده پشت فرمان ممکن است(حداقل در ابتدا) آزاردهنده باشد. اما با رایج شدن قابلیتهای خودران، رانندگان انسانی ممکناست بیش از حد به فناوری رانندگی خودکار متکی شوند و ایمنی خود را به دست اتوماسیون بسپارند، حتی زمانی که آنها باید به عنوان راننده پشتیبان در صورت خرابی نرمافزار یا مشکلات مکانیکی عمل کنند. دریک نمونه از مارس2018، شاسی بلند مدل Xتسلا در حالت رانندگی خودکار بود که با جداکننده خطوط بزرگراه برخورد کرد. به گفته این شرکت، علیرغم هشدارهای بصری و هشدار صوتی به راننده برای بازگرداندن دستانش روی فرمان، دستهای راننده روی فرمان نبود. تصادف دیگری زمانی رخ داد که هوشمصنوعی تسلا سمت انعکاس براق کامیون را با آسمان اشتباه گرفت.
ایمنی خودروهای خودران و چالشهای آن
خودروهای خودران باید یاد بگیرند که اشیاء بیشماری را در مسیر خودرو از شاخهها و زبالهها گرفته تا حیوانات و انسانها شناسایی کنند. چالشهای دیگر در جادهها تونلهایی هستند که به خاطر موانع طبیعی یا مصنوعی دچار تداخل در سیستم تعیین مکان جی پی اس میشوند، پروژههای ساختمانی که باعث تغییر مسیر یا تصمیمات پیچیده میشوند، مانند مکان توقف برای عبور وسایل نقلیه اضطراری، اینها چالشهایی هستند که گریبان هوش مصنوعی این ماشینها را میگیرد.
سیستمها باید در مورد زمان کاهش سرعت، انحراف یا ادامه شتاب به طور معمول تصمیمات آنی بگیرند. این یک چالش مداوم برای توسعه دهندگان است و گزارشهایی از تردید و انحراف غیرضروری خودروهای خودران در هنگام شناسایی اشیاء در داخل یا نزدیک جادهها وجود دارد.
این مشکل در یک تصادف مرگبار در مارس 2018 مشهود بود که در آن یک خودروی خودران که توسط اوبر اداره میشد، رخ داد. این شرکت گزارش داد که نرمافزار وسیله نقلیه یک عابر پیاده را شناسایی کرد، اما آن را مانع قابل عبور تشخیص داد و نتوانست برای جلوگیری از برخورد با او تغییر مسیر دهد. این تصادف باعث شد تویوتا آزمایش خودروهای خودران خود را در جادههای عمومی به طور موقت متوقف کند، اما آزمایش آن در جاهای دیگر ادامه خواهد داشت. موسسه تحقیقاتی تویوتا در حال ساخت یک مرکز آزمایشی در زمینی به مساحت 60 هکتار در میشیگان برای توسعه بیشتر فناوری خودروهای خودکار است.
مسئولیت حقوقی
با تصادفات، مسئله مسئولیت نیز مطرح میشود، و قانونگذاران بایستی تعریف کنند که چه کسی در هنگام تصادف یک خودروی خودران مسئول است. همچنین نگرانیهای جدی در مورد هک شدن نرمافزار مورد استفاده برای کار با وسایل نقلیه خودران وجود دارد و شرکتهای خودروسازی در حال تلاش برای رفع آن هستند. امنیت سایبری خودروسازان تابع استانداردهای ایمنی وسایل نقلیه موتوری فدرال هستند و NHTSA گزارش داد که باید کارهای بیشتری انجام شود تا وسایل نقلیه مطابق با این استانداردها باشند.
اما شرکتهای چینی رویه متفاوتی را در پیش گرفتهاند، آنها به دنبال تدوین مدیریت شهری براساس اکوسیستم ماشینهای خودران هستند. دولت چین شروع به طراحی مجدد مناظر شهری، سیاستها وزیرساختها میکند تا محیط زیست را برای خودروهای خودران دوستانهتر کند. این شامل نوشتن قوانینی در مورد نحوه حرکت انسانها و استخدام اپراتورهای شبکه تلفن همراه برای انجام بخشی از پردازش مورد نیاز برای ارائه دادههای مورد نیاز به وسایل نقلیه خودران است.
جمع بندی نهایی
مردم از نزدیک شاهد پیشرفتهای بیشتر به سمت وسایل نقلیه کاملاً خودران هستند. با پیشرفتی که هوش مصنوعی در دهه گذشته به دست آورده است، تنها مسئله زمان است که خودروها با خیال راحت در خیابانهای سراسر جهان حرکت کنند. در حال حاضر فاصله زیادی با خودروهای خودران سطح پنج وجود ندارد. دیگر وجود ماشینی با هدایت خودکار امری تخیلی و دور از انتظار نیست.